 EN
EN
 AR
AR
 HI
HI
 IT
IT
 KO
KO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 VI
VI
 TH
TH
 TR
TR
 FA
FA
 GA
GA
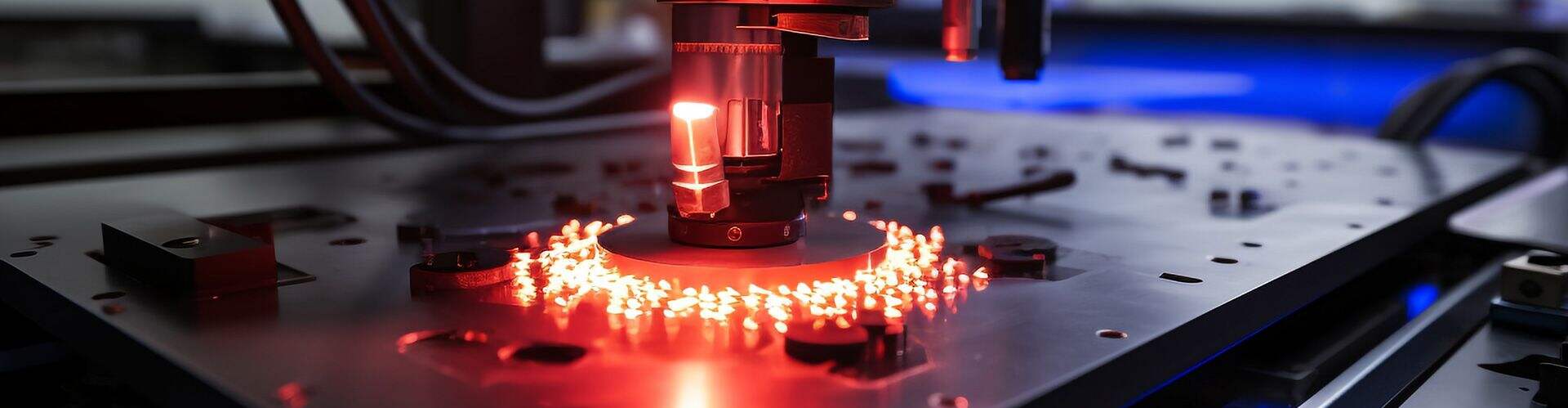
เทคนิคการควบคุมความแม่นยำในการเชื่อมเลเซอร์หุ่นยนต์
สถานะปัจจุบันของ หุ่นยนต์เชื่อมเลเซอร์ คือการออกแบบระดับสูงที่รวมทักษะภายในของหุ่นยนต์และความสามารถของหัวเชื่อมที่ติดตั้งเลเซอร์ DP Laser บริษัทระดับนานาชาติที่มีส่วนร่วมในการพัฒนาและออกแบบอุปกรณ์เชื่อมเลเซอร์ที่มีประสิทธิภาพสูง มีโซลูชันการเชื่อมด้วยหุ่นยนต์ที่หลากหลายซึ่งเหมาะสมกับความต้องการในอุตสาหกรรมต่างๆ
ความสำคัญของการควบคุมในการเชื่อมเลเซอร์ด้วยหุ่นยนต์
ในการเชื่อมเลเซอร์ด้วยหุ่นยนต์ การเชื่อมที่มีคุณภาพสูงสุดจะเกิดขึ้นจากการรวมพารามิเตอร์หลายอย่างเข้าด้วยกันอย่างแม่นยำที่สุด รายละเอียดหลายอย่างมีผลต่อความแม่นยำของช่างเชื่อม - ตำแหน่งที่แขนหุ่นยนต์ตั้งอยู่ ความมั่นคงของลำแสงเลเซอร์ และอัลกอริธึมการควบคุมต่างๆ ที่รับผิดชอบพารามิเตอร์เฉพาะของกระบวนการเชื่อม
ความสามารถในการจัดตำแหน่ง
เพื่อให้การเชื่อมอยู่ในตำแหน่งที่ถูกต้อง แขนหุ่นยนต์จำเป็นต้องวางหัวเชื่อมในมุมและระยะที่ถูกต้อง ซึ่งต้องการระบบควบคุมการเคลื่อนไหวที่ซับซ้อนซึ่งรวมเข้ากับเซ็นเซอร์ระดับสูงที่สามารถติดตามตำแหน่งของหัวเชื่อมได้แบบเรียลไทม์
เสถียรภาพของลำแสง
เพื่อผลิตการเชื่อมที่ดี ลำแสงเลเซอร์ต้องมีความคงที่และอยู่ภายใต้การควบคุม ความคลาดเคลื่อนเล็กน้อยในจุดโฟกัสหรือพลังงานของลำแสงจะทำให้คุณภาพการเชื่อมลดลง เครื่องจักรของ DP Laser ได้รับการติดตั้งด้วยเลเซอร์ที่มีเทคโนโลยีสูงรวมถึงระบบการส่งลำแสงที่มีความสามารถในการรักษาเสถียรภาพตลอดกระบวนการเชื่อม
อัลกอริธึมการควบคุม
อัลกอริธึมที่เกี่ยวข้องกับการเชื่อมเลเซอร์ด้วยหุ่นยนต์มีความสำคัญมากในการรับประกันว่าความแม่นยำจะถูกบรรลุ อัลกอริธึมเหล่านี้ยังกำหนดพารามิเตอร์ของการเชื่อมรวมถึง; ความเร็วในการเชื่อม ระดับพลังงาน จุดโฟกัส เป็นต้น พารามิเตอร์ข้างต้นมักจะเฉพาะเจาะจงต่อวัสดุและการเชื่อม และคาดว่าจะทำงานภายในขอบเขตที่กำหนด
เทคนิคในการเพิ่มความแม่นยำในการเชื่อมเลเซอร์ของหุ่นยนต์
ระบบการมองเห็น
ระบบการมองเห็นสามารถเพิ่มความแม่นยำในระหว่างการเชื่อมเลเซอร์ของหุ่นยนต์ได้อย่างมากโดยการติดตามกระบวนการเชื่อมในเวลาจริงและส่งข้อมูลนั้นกลับมา เส้นเชื่อมหรือแผงในกระบวนการเชื่อมจริงจะถูกถ่ายภาพโดยกล้องที่ติดอยู่กับแขนเชื่อมของหุ่นยนต์ซึ่งจะถูกใช้เพื่อกำหนดวิธีและสิ่งที่สามารถทำได้เพื่อปรับพารามิเตอร์การเชื่อมให้ถูกต้อง
การตอบสนองของแรง
ความแม่นยำของระบบการเชื่อมสามารถเพิ่มขึ้นได้โดยการใช้การตอบสนองของแรงซึ่งติดตามกระบวนการเชื่อมเพื่อตรวจจับปริมาณแรงที่ใช้ ข้อมูลนี้จะถูกใช้เพื่อเปลี่ยนพารามิเตอร์การเชื่อมเพื่อชดเชยความไม่แม่นยำในการติดตามเส้นทางการเชื่อมที่เหมาะสม
การควบคุมแบบปรับตัว
อัลกอริธึมการควบคุมแบบปรับตัวช่วยให้ระบบการเชื่อมสามารถเปลี่ยนแปลงพารามิเตอร์บางอย่างขึ้นอยู่กับสภาพการเชื่อม สภาพเหล่านี้อาจเกี่ยวข้องกับการเปลี่ยนแปลงในวัสดุ ความหนา ลักษณะพื้นผิว หรือปัจจัยภายนอกอื่น ๆ ที่อาจมีปฏิสัมพันธ์กับกระบวนการเชื่อม
สรุป
การเชื่อมด้วยเลเซอร์หุ่นยนต์เป็นเทคนิคที่โดดเด่นในกระบวนการผลิตที่แตกต่างจากกระบวนการอื่น ๆ ต้องการการควบคุมและการกำกับดูแลสูงสุดเพื่อให้ได้ผลลัพธ์ที่ต้องการ เครื่องเชื่อมหุ่นยนต์ของ DP Laser ได้รับการติดตั้งด้วยเทคโนโลยีและระบบควบคุมล่าสุดเพื่อกำหนดระดับความแม่นยำและความสามารถในการทำซ้ำที่โรงงานในปัจจุบันคาดหวัง ผ่านการใช้ระบบมองเห็นหรือการตอบสนองแรงควบคู่กับการควบคุมแบบปรับตัว การเชื่อมด้วยเลเซอร์หุ่นยนต์จึงเข้าถึงมิติใหม่ของความแม่นยำที่เกินกว่าความสามารถของเทคนิคการเชื่อมแบบดั้งเดิมใด ๆ ซึ่งทำให้การใช้เทคนิคดังกล่าวเป็นสิ่งจำเป็นสำหรับวัตถุประสงค์การผลิตที่มีคุณภาพสูง
