 EN
EN
 AR
AR
 HI
HI
 IT
IT
 KO
KO
 PL
PL
 PT
PT
 RU
RU
 ES
ES
 VI
VI
 TH
TH
 TR
TR
 FA
FA
 GA
GA
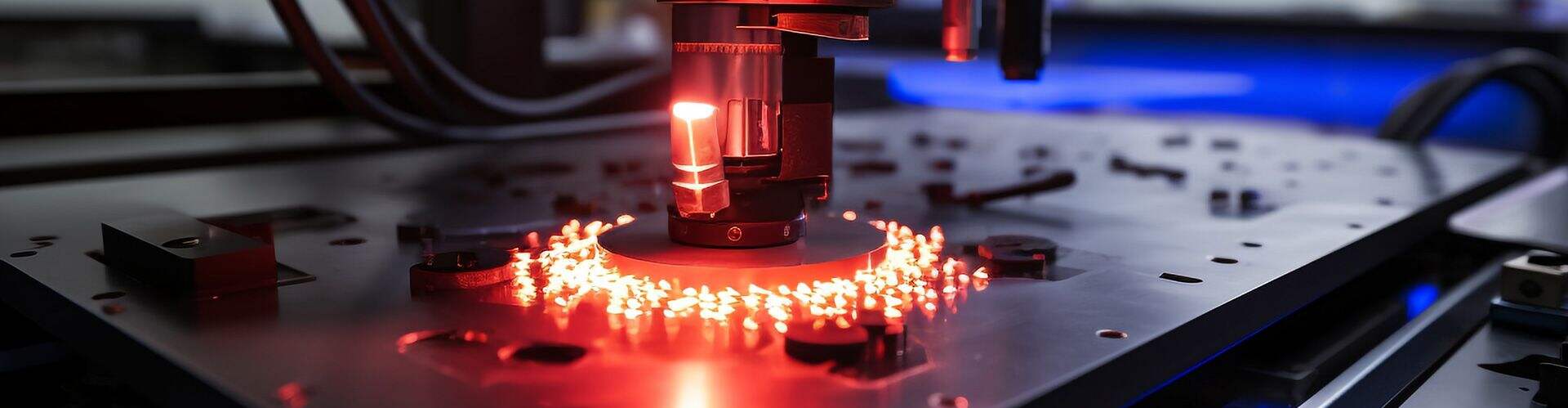
로봇 레이저 용접의 정밀 제어 기술
현재 상황 로보트 레이저 용접 로봇의 내부 기술과 레이저로 장착된 용접 머리의 능력을 결합한 고급 설계입니다. 고효율 레이저 용접 장치의 개발 및 설계에 종사하는 국제 회사 DP 레이저는 다양한 산업 요구 사항에 적합한 광범위한 로봇 용접 솔루션을 제공합니다.
로봇 레이저 용접 에서 제어 의 중요성
로봇 레이저 용접에서, 최고 품질의 용접은 여러 매개 변수를 극도의 정확도로 합쳐서 생산됩니다. 많은 세부 사항이 용접자의 정확성에 영향을 미칩니다. 로봇 팔의 위치, 레이저 빔의 안정성 및 용접 과정의 특정 매개 변수에 대한 다양한 제어 알고리즘.
위치 를 파악 하는 능력
용접이 올바른 위치에 배치되기 위해서는 로봇 팔이 용접 머리를 올바른 각도와 거리에 배치해야합니다. 이 경우, 머리 위치를 실시간으로 추적할 수 있는 고급 센서와 통합된 복잡한 모션 제어 시스템이 필요합니다.
빔 안정성
좋은 용접을 하기 위해서는 레이저 빔이 일정하고 조절되어야 합니다. 빔 초점이나 전력의 작은 오차로 용접 품질이 떨어질 것입니다. DP 레이저의 기계는 첨단 레이저와 함께 용접 과정 내내 안정적으로 유지할 수있는 빔 전달 시스템을 갖추고 있습니다.
제어 알고리즘
로봇 레이저 용접에 관련된 알고리즘은 정확성을 확보하는 데 매우 중요합니다. 이 알고리즘은 또한 등 등 등 등 등 열의 매개 변수를 결정 열의 속도, 전력 수준, 초점 등 위의 매개 변수는 항상 재료와 열의 특정이며 특정 한계 내에서 작동 할 것으로 예상됩니다.
로봇 레이저 용접의 정밀도를 높이는 기술
시력 시스템
시각 시스템은 로보트 레이저 용접 과정에서 정확도를 크게 높일 수 있습니다. 실시간으로 용접 과정을 추적하고 그 정보를 다시 공급함으로써요. 실제 에 있는 매듭이나 패널은 로봇의 팔에 부착된 카메라에 의해 이미지로 촬영되며, 그 다음 로봇의 매개 변수를 올바르게 조정하기 위해 어떻게 그리고 무엇을 할 수 있는지 결정하는 데 사용됩니다.
힘 피드백
용접 시스템의 정확도는 사용된 힘의 양을 감지하기 위해 용접 과정을 모니터링하는 힘 피드백을 사용하여 증가 할 수 있습니다. 이 데이터는 적절한 용접 경로를 따르는 모든 부정확성을 고려하여 용접 매개 변수를 변경하는 데 사용됩니다.
적응력 제어
적응 제어 알고리즘은 용접 시스템에 용접 조건에 따라 몇 가지 매개 변수를 변경할 수 있습니다. 이러한 조건은 재료, 두께, 표면 특징 또는 용접 절차와 상호 작용할 수 있는 다른 외부 요인 등의 변화를 포함할 수 있다.
결론
로봇 레이저 용접은 제조에서 지배적인 기술이며 다른 모든 절차와 달리 원하는 결과를 얻기 위해 최대 제어와 규제를 필요로합니다. DP 레이저의 로봇 용접 기계는 최신 기술과 제어 시스템으로 통합되어 오늘날의 공장들이 기대하는 정확성과 반복성을 미리 설정했습니다. 시각 시스템이나 힘 피드백과 함께 적응 제어의 사용으로, 로봇 레이저 용접은 고급 생산 목적으로 그러한 기술을 사용해야 하는 모든 전통적인 용접 기술의 능력을 초과하는 새로운 정밀 차원에 도달합니다.
